电机驱动器是一种电子设备,它可以根据输入信号放大电流,从而改变电机特性。必须根据电机类型选择合适的电机驱动器。
Orbray 提供与无刷电机兼容的驱动器。
还配备了可与外部设备通信的 I/O(输入/输出)接口,或者附带专用软件。
利用这些功能,您可以轻松驱动并监控Orbray电机,非常适合用于试作或验证阶段。
※ 驱动器不单独销售,购买时请务必与电机一并考虑。
| 产品 | 适用马达类型 | 电源电压 [V] |
最大输出电流 [A] |
最大旋转速度 [rpm] |
控制 |
|---|---|---|---|---|---|
| SOD12ST | BMN02-05 | 11.5~12.5 | 0.7 | 180,000 | Sine wave 正弦波 |
| SSD06-R5A | BMN04 series / BMN07 series | 1.8~5.5 | 0.25 | TBD | PWM |
| SHSD24-01A | 无刷马达(霍尔传感器:有/无) | 7.5~26.4 | 2 | 150,000 | Speed 转速 |
| PSV24-05E | 无刷马达(编码器、霍尔传感器要)※ | 6~26 | 15 | 80,000 | 位置、转速、电流(扭矩) |
无刷马达驱动板 SOD12ST

规格
| SOD12ST | |
|---|---|
| 适用马达类型 | 无刷马达 BMN02-05 |
| 电源电压[V] | 11.5~12.5 |
| 最大输出电流[A] | 0.7 |
| 最大連続电流[A] | 0.7 |
| 最大旋转速度[rpm] | 180,000 |
| 指令方式 | - |
| 控制方法 | Sine wave 正弦波 |
| 保护功能 | - |
| 运行温度范围[℃] | 0~+50 |
| 长度[mm] | 66.1×100×32 |
| 重量[g] | 60 |
| 软件 | - |
| 付属品 | AC适配器 |
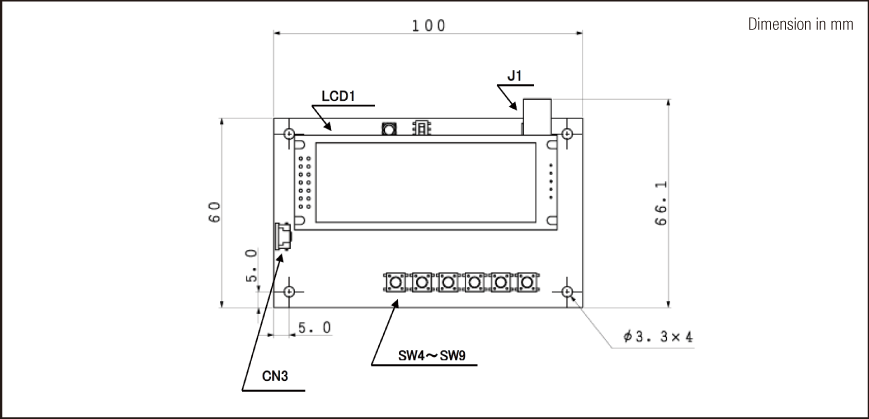
连接器/切换/引脚排列
| SOD12ST | |
|---|---|
| J1 | 电源入力 适配器入力 |
| CN3 | 马达连接器 |
| SW4 | 回転数设定 |
| SW5 | 转速计数递增 |
| SW6 | 旋转方向切换 |
| SW7 | 马达启动时间设定 |
| SW8 | 马达电压设定 |
| SW9 | 启动 / 停止 |
| LCD1 | 显示设定状态及马达运行状态 |
| CN3-1 | 马达线圈W 相 |
| CN3-2 | 马达线圈W 相 |
| CN3-3 | N.C |
| CN3-4 | 马达线圈V 相 |
| CN3-5 | 马达线圈U 相 |
| CN3-6 | 马达线圈U 相 |
无刷电机驱动器SSD06-R5A

规格
| SSD06-R5A | |
|---|---|
| 适用马达类型 | 无刷马达 BMN04 / BMN07 |
| 电源电压[V] | 1.8~5.5 |
| 最大输出电流[A] | 0.25 |
| 最大連続电流[A] | TBD |
| 最大旋转速度[rpm] | TBD |
| 指令方式 | 速度指令PWM入力 |
| 控制方法 | PWM |
| 保护功能 | 电流限制 |
| 运行温度范围[℃] | -20~+75 |
| 长度[mm] | 14×24×3.8 |
| 重量[g] | 1.1 |
| 软件 | - |
| 付属品 | - |
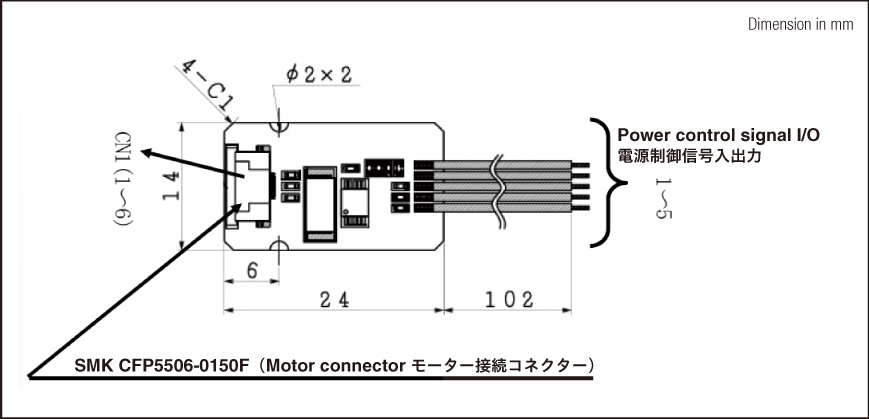
连接器/切换/引脚排列
| SSD06-R5A | |
|---|---|
| CN1-1 | W phase W相 |
| CN1-2 | W phase W相 |
| CN1-3 | COM |
| CN1-4 | V phase V相 |
| CN1-5 | U phase U相 |
| CN1-6 | U phase U相 |
| 引线1 (黑) | GND |
| 引线2 (红) | VCC |
| 引线3 (白) | FG脉冲出力信号 |
| 引线4 (黄) | 旋转方向输入信号 |
| 引线5 (蓝) | 占空比控制脉冲输入 |
数字伺服驱动板 SHSD24-01A
规格
| SHSD24-01A | |
|---|---|
| 适用马达类型 | 无刷马达(霍尔传感器有無) | 电源电压[V] | 7.5~26.4 |
| 最大输出电流[A] | 2 |
| 最大連続电流[A] | 1 |
| 最大旋转速度[rpm] | 150,000 |
| 指令方式 | 数字I/O、模拟I/O、串行通信(RS232C・USB) |
| 控制方法 | 速度 |
| 保护功能 | 欠电压、过电压 |
| 运行温度范围[℃] | -10~+50 |
| 长度[mm] | 83×63×21 |
| 重量[g] | 36.5 |
| 软件 | SHSD24-01A.Controller |
| 付属品 | PCB 支撑柱、LCD(选项) |
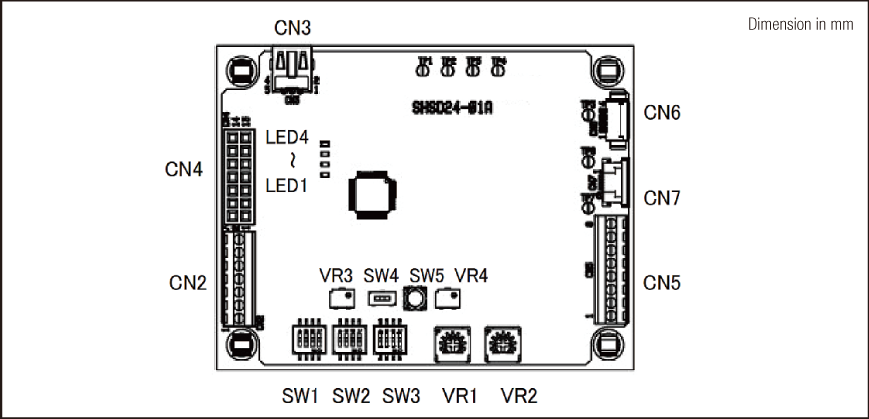
连接器/切换/引脚排列
| SHSD24-01A | ||
|---|---|---|
| CN2 | 电源,各I/O连接器 | |
| CN3 | RS232C通信用连接器 | |
| CN4 | LCD用连接器(选配) | |
| CN5 | 马达接続用连接器(引线型) | |
| CN7 | 马达接続用连接器(BMN04,BMN07系列) | SW1 | 机种设定用开关 |
| SW2 | 驱动模式及控制方式选择开关 | |
| SW3 | PI增益和旋转方向切换开关 | |
| SW4 | 马达电圧选择 | |
| SW5 | 复位开关SW | |
| VR1※ | 用于调整马达启动时的PWM占空比 | |
| VR2※ | 用于调整马达目标转速 (在VR模式下) |
|
| VR4※ | 用于调整马达最大输出电流 | |
| LED1 | 显示驱动器设定错误 | |
| LED2 | 显示马达驱动错误 | |
| LED3 | 显示驱动器状态 | |
| LED4 | 显示电源状态 | |
微型伺服驱动板PSV24-05E
规格
| PSV24-05E | |
|---|---|
| 马达类型 | 无刷马达(编码器/霍尔传感器要) ※关于空心杯马达驱动,请咨询我们 |
| 电源电压[V] | 6~26 |
| 最大输出电流[A] | 15 |
| 最大連続电流[A] | 4 |
| 最大旋转速度[rpm] | 80,000 |
| 指令方式 | 数字I/O、模拟I/O、串行通信(RS485・USB)、EtherCAT |
| 控制方法 | 位置,速度,电流(扭矩) |
| 保护功能 | 过流、驱动器过热、过压、逆变电路异常、过载、编码器异常、霍尔传感器异常 |
| 运行温度范围[℃] | -25~+45 |
| 长度[mm] | 90×58×33 |
| 重量[g] | 84 |
| 软件 | PSV24-Control |
| 付属品 | STO备用连接器、电源连接器、垫片(选配)、防护罩(选配) |
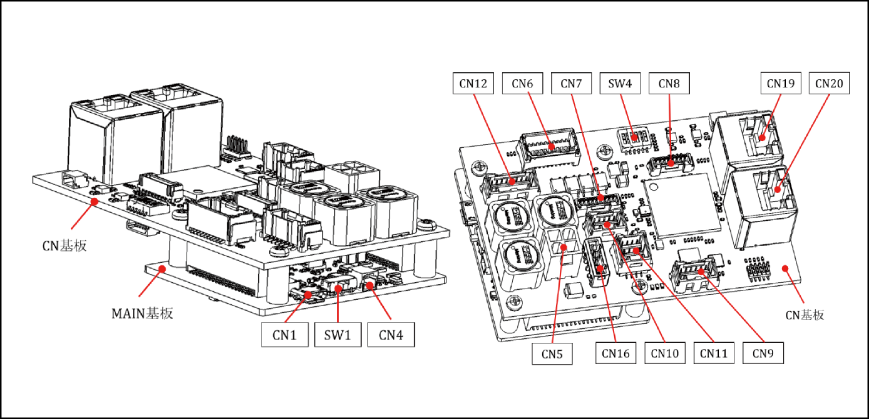
连接器/切换/引脚排列
| PSV24-05E | |
|---|---|
| CN1 | USB |
| CN4 | RS485 |
| CN5 | 马达 |
| CN6 | 数字I/O |
| CN7 | 霍尔传感器 |
| CN8 | 模拟I/O |
| CN9 | 绝对值编码器 |
| CN10 | 编码器输出 |
| CN11 | 增量式编码器 |
| CN12 | STO |
| CN16 | 电源 |
| CN19 | EtherCAT(input 入力) |
| CN20 | EtherCAT(output 入力) |
| SW1 | USB/RS485 切换 |
| SW4 | ID设定 |
四轴伺服驱动器(开发品)
除了单轴伺服驱动器 PSV24-05E 以外,本公司还开发了多轴伺服驱动器。 一台驱动器可控制最多 4 轴,具备位置决定、速度控制、电流控制、回原点、直线插补等功能。 采用 RS485 通信,可菊链连接最多 16 台(4 轴 × 16 台 = 64 轴)并行运转。结构紧凑,有利于系统节省空间, 适用于机器人手臂、机械手、医疗设备等用途。随驱动器还提供便于初期动作确认或实验用途的专用软件。
备注)※马达必须配备编码器才能驱动。与不带霍尔传感器的无刷电机不兼容。

参考规格
| 电路板外形尺寸 | 100x100x22.2mm (不包括连接器和其他突出部分) |
控制I/F | ・USB 串行通信 ・RS485通信 ※支持菊花链连接,最大连接数量为16台。 |
| 兼容马达 | 三相DC空芯杯无刷马达 (带霍尔传感器、带编码器) |
控制方法 | PWM、具备位置决定、速度控制、电流控制、 回原点(原点、限位、定位挡块) |
| 供应电压 | 24V | 编码器连接 | 增量式(绝对值编码器也支持) |
| 输出电流 | 连续2A以下、最大4A以下 (每台马达) |
输入 | ・限位传感器输入:8点(4轴×2) ・原点传感器输入:4点 (4轴×1) ・紧急停止输入:4点 (4轴×1) |